

-
首页
-
产品中心
物联感知产品
物联网行业产品
物联通信产品
商用产品
云端产品
-
解决方案
组网解决方案
平台解决方案
低速无人驾驶
行业资讯
- · 低速无人驾驶赛道迎规模化亮眼成绩单:多家企业无人车部署突破千台
- · 小鹏与华为的智驾差距:激光雷达不是关键,15万人的“全民数据大赛”才是真正难复刻的护城河
- · 无人配送RaaS革命:从“钢铁骡子”到城市物流新基建
- · 飞步科技荣获中国港口科技进步奖特等奖,实现“算法—技术—产品—标准”全维度顶级认证
- · 性价比环卫机器人问世,赛特智能引领行业普惠化
- · 小竹无人车物流深度布局,L4业务场景创新能力实现历史跨越
- · 厦门翔安国际机场2026年底投用,自动驾驶牵引车赋能智慧空港
- · 深度协同,重构竞合——低速无人驾驶产业链竞合新格局
- · 智慧环卫新格局:从“技术验证”到“规模商用”-国家队入场改写无人环卫竞争格局
- · 无人车拐点:从“拼算法”到“重底盘”,规模化运营的根基正在重塑
-
四信云
-
关于我们
关于四信
企业动态
商务合作
联系我们
-
技术支持

































自动驾驶5G/V2X车路协同:为什么“车联网”才是终极安全?
解决方案
解决方案
-
组网解决方案
-
5G+行业应用
-
工业物联网
-
智慧交通
-
智慧城市
-
新零售
-
智慧农业
-
智慧电力
-
安防监控
-
智慧环保
-
智慧水务
-
能源行业
-
智慧医疗
-
商业与金融
-
-
平台解决方案
-
供暖行业
-
智慧环保
-
-
低速无人驾驶
很多人认为,自动驾驶只要把车本身做“聪明”就够了——装满传感器、升级算力、优化算法。但实际上,再智能的车,也有“看不见”的盲区;再强大的算法,也躲不开突发风险。这就是5G/V2X车路协同存在的意义:让车“看见”更远、更全,实现“车-路-人-云”的无缝联动。
一、单车智能的“致命盲区”:看得见近处,看不见远方
即使是L4级自动驾驶,单车智能也有无法突破的局限:
视线遮挡:前方大型货车遮挡红绿灯、路口盲区有行人冲出,车载传感器无法提前感知
距离限制:激光雷达有效探测距离约200米,高速行驶时,200米的反应距离不足以应对突发情况
极端场景:暴雨、大雾、暴雪天,所有车载传感器都会受影响,探测精度大幅下降
就像人开车,再谨慎也会有“顾前不顾后”“顾左不顾右”的情况,单车智能的盲区,就是自动驾驶的安全隐患。
二、V2X车路协同:给车装“千里眼”和“顺风耳”
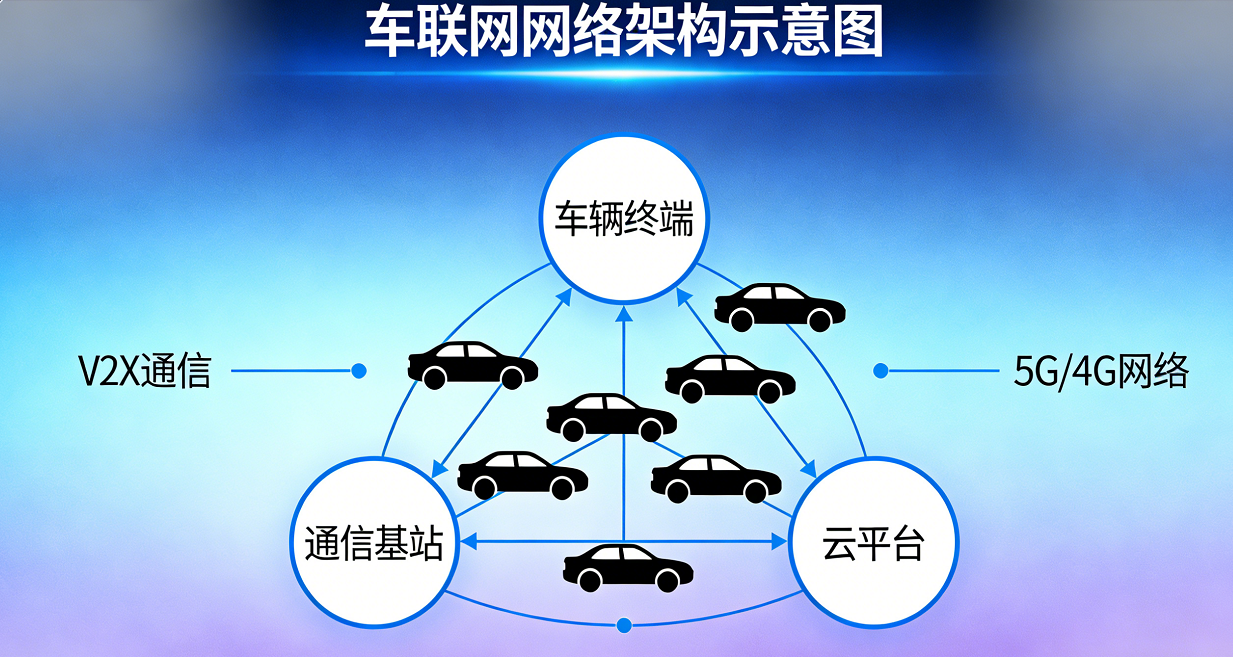
V2X(Vehicle to Everything),即车与万物互联,核心是通过5G网络,让车和道路、行人、其他车辆、云端实现实时通信,打破单车感知的局限:
V2I(车与路):路边的智能路侧单元(RSU)实时采集路况、红绿灯、施工信息,提前推送至车辆,让车“看见”看不到的路
V2V(车与车):两辆车之间实时共享速度、转向、刹车意图,即使不在视线范围内,也能提前预判碰撞风险
V2P(车与人):行人、非机动车佩戴的智能设备(如手机、智能手环)与车辆通信,避免“鬼探头”等突发事故
V2C(车与云):云端平台汇总区域内所有车辆、道路数据,优化路线、调度交通,甚至远程干预危险驾驶
举个例子:当你开车经过一个盲区路口,路边的RSU检测到有行人正在横穿马路,会立刻通过5G网络把信息推送给你的车,即使你没看到,车辆也会自动减速、刹车,避免事故。
三、5G是关键:没有高速网络,车路协同就是“空谈”
车路协同对网络的要求,远超普通民用网络,而5G恰好完美匹配这些需求:
- 低延迟:5G端到端延迟可低至10毫秒以内,比人类反应速度(200-300毫秒)快20倍以上,刹车指令、预警信息能瞬间传递
- 高带宽:每平方公里可连接100万个设备,路边RSU、车载终端、行人设备同时通信,不会出现卡顿、掉线
- 高可靠:5G的可靠性可达99.999%,即使在复杂路况下,也能保证通信不中断——对自动驾驶而言,一次通信中断,可能就是一次事故
对比4G网络:延迟约50-100毫秒,高速行驶时,这个延迟足以让车辆多行驶1-2米,错过最佳刹车时机;而5G的低延迟,正是车路协同的“生命线”。
四、从“单车智能”到“车路协同”:自动驾驶的终极方向
单车智能是“让车变聪明”,车路协同是“让路变智能、让万物互联”,两者结合,才能实现真正的全场景自动驾驶:
- 降低单车成本:有了路侧设备的辅助,车载传感器可以适当简化,减少激光雷达等高价部件的使用,让自动驾驶汽车更亲民
- 提升安全冗余:即使车载传感器失效,路侧设备和其他车辆的信息也能支撑车辆做出安全决策,双重保障更安心
- 实现全场景适配:无论是城市拥堵路段、高速路,还是暴雨、大雾等极端天气,车路协同都能弥补单车智能的不足,让自动驾驶覆盖更多场景
5G/V2X车路协同不是自动驾驶的“补充项”,而是实现终极安全、全场景落地的“必选项”。单车智能决定了自动驾驶的“下限”,而车路协同,决定了自动驾驶的“上限”。未来,没有车联网的自动驾驶,终将无法走向普及。
更多详情案例,请联系我们的专家团队
厦门四信通信科技有限公司(版权所有)闽ICP备08106834号-1 ©2008-2026  闽公网安备
35021102001059号
闽公网安备
35021102001059号
关注我们











