

-
首页
-
产品中心
物联感知产品
物联网行业产品
物联通信产品
商用产品
云端产品
-
解决方案
组网解决方案
平台解决方案
低速无人驾驶
行业资讯
- · 告别“等图一个月”:L4级无图自动驾驶方案量产,无人配送进入“即买即用”时代
- · 从北上广深到县城乡村:低速无人车的“下沉突围”与全场景渗透
- · 传统车企“跑步入场”:低速无人物流车从初创主导迈向“整车+智驾”深度融合
- · 无人矿区通信新基建:双方案,全场景,零卡顿
- · 无人车“大航海时代”:四大场景挺进深蓝,全球运力重构战打响
- · 自动驾驶“分拆潮”起:估值逻辑变天,还是战略必然?
- · 智能网联汽车:从“新能源汽车之都”到“无人之境”领跑者
- · “无人驾驶、有人运营”困局何解?来电岛:自动补能+智能运营+城市成网
- · 无人配送车“遍地跑”的时代,正从山东加速到来
- · 「视觉原生」破局:视启未来的隐空间世界模型,与物理世界AI的OS野心
技术应用
- · 轻量化无图化算法成主流!2026低速自动驾驶告别高精地图重部署痛点
- · 矿区无人驾驶——在“卫星信号拒止”与“漫天粉尘”中突围
- · 无人环卫——在“厘米级贴边”与“全天候作业”间寻找平衡
- · 港口室外AGV导航技术场景适配与落地优化方案解析
- · 双剑合璧:Meteor与Genario如何斩断自动驾驶的“长尾”
- · 一文读懂自动驾驶数据闭环:从概念到实践
- · 智慧公交与自动泊车——“人-车-路-云”深度协同的出行新范式
- · 封闭与半封闭园区自动化——从厂区物流到无人矿卡的车路云实践
- · 从PTP到gPTP:时间同步技术进化,为无人驾驶安全驶入“纳秒时代”铺路
- · 高速公路与城市物流——超视距感知如何重塑货运安全与效率
-
四信云
-
关于我们
关于四信
企业动态
商务合作
联系我们
-
技术支持

































为什么自动驾驶要推动用T1接口替代?
方案优势
解决方案
解决方案
-
组网解决方案
-
5G+行业应用
-
工业物联网
-
智慧交通
-
智慧城市
-
新零售
-
智慧农业
-
智慧电力
-
安防监控
-
智慧环保
-
智慧水务
-
能源行业
-
智慧医疗
-
商业与金融
-
-
平台解决方案
-
供暖行业
-
智慧环保
-
-
低速无人驾驶
如果你打开一辆传统燃油车的车门,会发现它的“神经系统”是由CAN总线构成的——这种诞生于上世纪80年代的技术,用一对双绞线就能连接车上几十个电子控制单元(ECU),让车窗升降、灯光控制、ABS防抱死这些功能协同工作。CAN总线的带宽是多少?500Kbps。这个速度传输文本指令绰绰有余,但放在今天,传一张500万像素的照片就要8秒钟。
而一辆L4级自动驾驶汽车,每秒产生的数据量是多少?答案是GB级别。
这就引出了一个问题:为什么传统汽车的通信技术,到了自动驾驶时代突然“不够用”了?而T1接口——也就是车载以太网,为什么成了必然的替代方案?
一、带宽鸿沟:从“发短信”到“看蓝光”
我们先看一组数据:
|
技术 |
带宽 |
传输1GB数据所需时间 |
类比 |
|
CAN总线 |
500 Kbps |
约4.5小时 |
短信 |
|
100BASE-T1 |
100 Mbps |
约80秒 |
4G网络 |
|
1000BASE-T1 |
1000 Mbps |
约8秒 |
千兆光纤 |
自动驾驶汽车的传感器配置正在指数级增长:
- L2级辅助驾驶:1个前置摄像头 + 3个毫米波雷达,数据量约 100 Mbps
- L3级有条件自动驾驶:5-8个摄像头 + 5个雷达 + 1个激光雷达,数据量约 500 Mbps - 1 Gbps
- L4/L5级高度自动驾驶:10-15个摄像头 + 10个雷达 + 3-5个激光雷达,数据量超过5-10 Gbps
用CAN总线跑自动驾驶,就像用拨号上网看4K视频——不是能不能流畅的问题,是根本没法启动。传统总线在物理层面就被锁死了带宽天花板,而T1接口从100M到1G,再到10G的演进路径,为自动驾驶提供了必要的“数据管道”。
二、减重刚需:4对线 vs 1对线的物理革命
你可能觉得,线束能有多重?算一笔账:
传统工业以太网(RJ45接口)采用100BASE-TX标准,需要4对线(8根)才能实现100Mbps传输。在一辆车上,所有摄像头、雷达、显示器的线束加起来,总长度可能超过4公里,总重量可达50公斤。
50公斤是什么概念?对电动车来说,这相当于:
- 减少约5-8公里的续航里程
- 相当于多坐了一个小孩的重量在车上
而T1接口的核心革命是:只用1对线就能实现相同甚至更高的带宽。
以1000BASE-T1为例:
- 线缆数量减少75%
- 线束重量降低40%-60%
- 弯折半径更小,布线更灵活
这意味着什么?车企省下了成本,电动车多出了续航,装配工人不用再面对一团乱麻似的线束——这是产业链上所有人都能感受到的变化。
三、抗干扰:车内不是办公室
把办公室里的网线插到汽车上会怎样?大概率会出问题。
汽车内部堪称“电磁地狱”:
- 发动机点火瞬间产生高压脉冲
- 电机控制器频繁开关产生高频干扰
- 各种电子设备互相串扰
传统的RJ45接口和双绞线,设计之初是为办公室和家庭环境服务的,根本没有考虑过这种极端工况。而T1接口从底层开始就为汽车重新设计:
物理层变革
- 采用PAM3(100BASE-T1)或PAM4(1000BASE-T1)编码技术,信号调制方式更抗噪
- 回波抵消技术,让同一对线同时收发数据而不互相干扰
- 严格的电磁兼容(EMC)设计,满足CISPR 25 Class 5等车规标准
连接器升级
- T1接口的连接器(如MATEnet、H-MTD)采用全屏蔽设计
- 满足 -40°C 到 +125°C 的工作温度范围
- 抗震等级达到汽车电子AEC-Q100标准
简单说,RJ45是“办公室文员”,T1是“特种兵”。
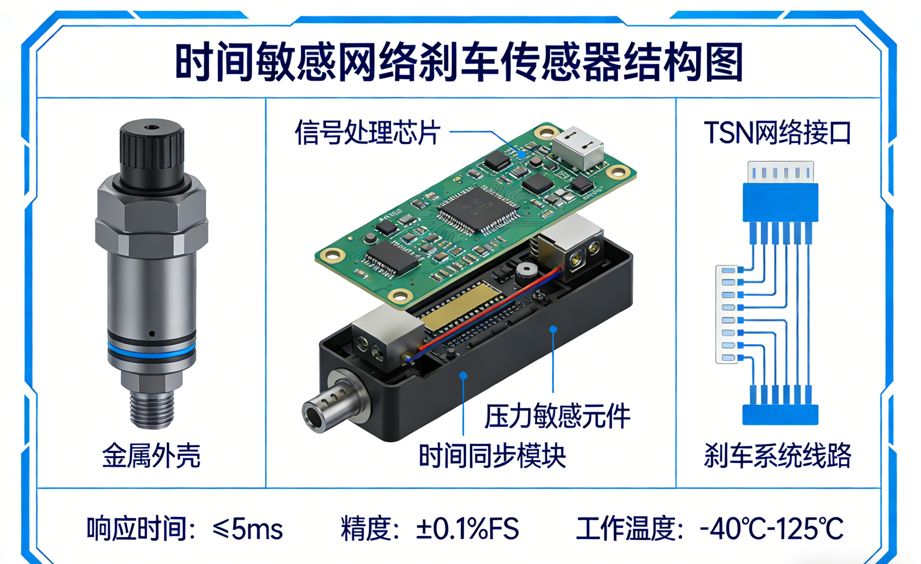
四、时间敏感网络:让刹车信号“准时”到达
自动驾驶有一个致命的难题:多个传感器的时间同步。
摄像头看到障碍物的瞬间,雷达同时检测到同一目标,激光雷达也在生成点云。这三个数据必须在微秒级的时间精度内对齐,才能准确判断物体的位置和速度。如果时间对不上,融合算法就会“看到”三个不同的障碍物。
传统的以太网是“尽力而为”的传输机制——数据包什么时候到,不确定。听音乐时卡顿一下可以忍受,但刹车信号卡顿5毫秒,可能就是事故。
T1接口引入了时间敏感网络(TSN,Time-Sensitive Networking)技术。它给网络装上了“原子钟”:
- 所有设备同步到同一个时钟基准
- 关键数据包预留专用“快车道”
- 传输延迟可以控制在微秒级别
这就是为什么自动驾驶必须用T1——它不仅要传得快,还要传得“准时”。
五、PoDL:一根线搞定供电和通信
摄像头装在车外后视镜上,雷达藏在保险杠后面,激光雷达立在车顶——这些传感器都有一个共同需求:既要供电,又要传数据。
传统方案是两根线供电,两根线传数据(或者用同轴电缆)。而T1接口支持的PoDL(Power over Data Line,数据线供电)技术,让同一对线既传数据又供电:
- 低压版本:5-12V,为摄像头、传感器供电
- 高压版本:12-48V,为更高功率设备供电
这意味着什么?线束数量再减一半,接头更少,故障点更少,装配更简单。一个典型的自动驾驶摄像头,原来需要4根线(电源+地+差分信号对),现在只需要2根线。
六、从“诸侯割据”到“中央集权”
最后,我们跳出技术细节,看一个更大的图景。
传统汽车的电子电气架构是分布式的——每个功能都有自己的ECU,各管一摊,通过CAN总线简单通信。一辆车可能有70-100个ECU,就像一个小国林立的状态。
自动驾驶需要的是集中式计算——所有传感器数据汇集到中央大脑(域控制器或中央计算机),统一处理、统一决策。这种架构对通信网络的要求完全不同:
- 带宽:海量数据上传
- 实时性:控制指令下达
- 可靠性:任何节点故障不能导致系统崩溃
T1接口支撑的正是这种“中央集权”式架构。它以交换机为核心,构建起星形或环形网络,让数据在正确的时间到达正确的地方。
结论:T1不是“选择题”,是“必答题”
从CAN总线到T1接口,不是简单的技术升级,而是汽车根本属性的改变:
传统汽车是“机械产品+电子控制”,通信需求有限
自动驾驶汽车是“轮式机器人+数据中心”,通信是生命线
T1接口的替代,本质上是汽车从“功能机器”进化为“智能终端”的必然结果。它解决的不是“能不能上网”的问题,而是“能不能安全自动驾驶”的问题。
今天,100BASE-T1和1000BASE-T1已经成为主流;明天,2.5G、5G、10G的T1标准正在路上。而那个熟悉的RJ45接口,将永远留在办公室和家庭里,不会出现在自动驾驶汽车上。
更多详情案例,请联系我们的专家团队
厦门四信通信科技有限公司(版权所有)闽ICP备08106834号-1 ©2008-2026  闽公网安备
35021102001059号
闽公网安备
35021102001059号
关注我们











